


安全参数#
查看安全参数#
单击上部状态栏上的“安全CRC”按钮,打开以下对话框,查看当前活动的安全配置参数。
或者,您可以在设置页面-安全设置中查看安全配置参数。

图4‑1查看安全参数#
安全参数的变更与应用#
在更改安全配置之前,您必须使用密码解锁机器人。进入设置页面-安全配置,点击左下角的“解锁”按钮,只有在“切断手臂电源”的情况下才能解锁,输入密码(当前登录用户的登录密码),验证通过后进入安全参数配置模式。 此时,状态栏上的状态显示区域显示“安全参数配置”。

图4‑2安全参数配置#
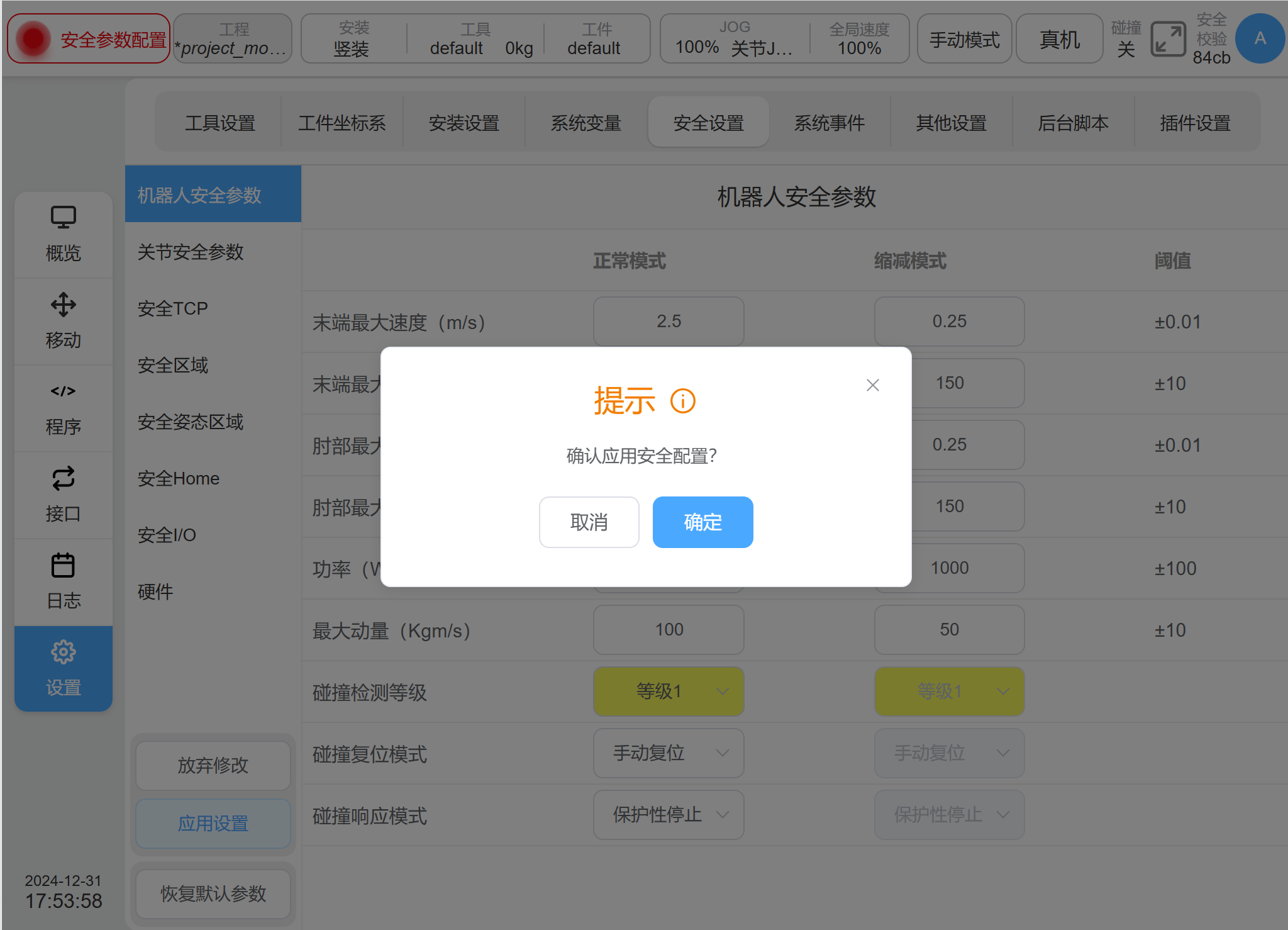
图4‑3安全参数确认#
单击“确认”按钮后,将显示加载安全参数过程的提示框,如图所示。

图4‑4安全参数下载#
安全参数配置完成后,系统将在弹出窗口中再次显示配置的安全参数,供用户检查。如下图所示,检查确认无误后,点击“确定”按钮配置安全参数。配置成功后,状态栏顶部的安全检查将更改。

图4‑5安全参数验证#
机器人安全参数#
机器人参数用于限制一般机器人运动。它能够在正常和缩减模式下配置其参数值。
参数 |
描述 |
|---|---|
TCP最大速度 |
空间机器人安全TCP最大线速度限制。 |
TCP最大力 |
机器人安全TCP最大力限制。 |
肘部最大速度 |
空间机器人安全肘部最大线速度限制。 |
肘部最大力 |
机器人安全肘部最大力限制。 |
功率 |
限制机器人的最大机械功率,将机器人有效载荷视为机器人身体的一部分。 |
最大动量 |
限制机器人输出的最大动量,将机器人有效载荷视为机器人身体的一部分。 |
碰撞等级 |
检测机器人与外界碰撞的灵敏度,级别越高,灵敏度越高(详见“安全功能-碰撞检测”章节)。系统集成商可以根据“安全功能-碰撞检测-碰撞力估算”章节快速估算碰撞力。 |
碰撞响应 |
设置碰撞后应触发哪个安全停止作为反应。可以设置为SS2或STO。 |
Warning
系统集成商应在配置后重新评估机器人碰撞检测性能。
关节安全参数#
关节参数限制用于限制机器人每个关节的最小位置、最大位置、速度和扭矩。 它能够在正常和缩减模式下配置它们的参数值。
参数 |
描述 |
|---|---|
最小位置 |
定义每个关节的最小位置。 |
最大位置 |
定义每个关节的最大位置。 |
最大速度 |
定义每个关节的最大角速度。 |
最大扭矩 |
定义每个关节的最大扭矩。 |
安全TCP#
安全系统可以定义三组TCP偏移,配置后,机器人将使用这些偏移进行速度监测和位置监测。 TCP位置和速度中的任何一个超过安全设置都将触发安全违规。
速度监测是“机器人安全参数”中机器人安全TCP中心在空间中的最大线速度,位置监测是“安全区域”。 可以设置三个安全TCP,有两种方法可以定义TCP,要么选择全局变量中定义的TCP坐标系,要么自定义输入坐标系的值。使用预定义的TCP坐标系时,将选择TCP坐标系,并在X、Y、Z输入框中显示TCP坐标系的值。如果修改了X、Y和Z值,则坐标系将进行自定义。选择“自定义输入数据”后,将直接编辑X、Y、Z、Rx、Ry、Rz的值和包络半径。
每个安全TCP都可以设置:禁用、始终处于活动状态、自动模式处于活动状态,安全组合配置1、安全组合配置2、五种激活条件。 当所有三个TCP都禁用时,安全控制系统默认使用法兰坐标系,球半径为50毫米。在TCP配置列表上,显示相应TCP的配置状态,如果禁用TCP,则相应状态为灰色。
安全区域#
安全区域定义类型包括平面、空间矩形和圆柱体。用户最多可以设置6个相互独立的空间区域。
安全区域的激活配置有:禁用、始终激活、自动模式激活、安全组合配置1和安全组合配置2,共5种类型。
安全区域的边界响应是指机器人从外部进入安全区域并在内部运动中超出边界时的响应,有两种响应模式,即:限制超出边界和进入区域触发缩减模式。当选择“限制超出边界”时,它描述了机器人在内部运动中超过边界时的响应;选择“进入触发缩减模式”时,它描述了机器人从外部进入区域时的响应,并在机器人离开区域时恢复正常模式。 空间区域也可以设置为包括或不包括肘部限制,肘部的空间范围以球半径的形式设置。
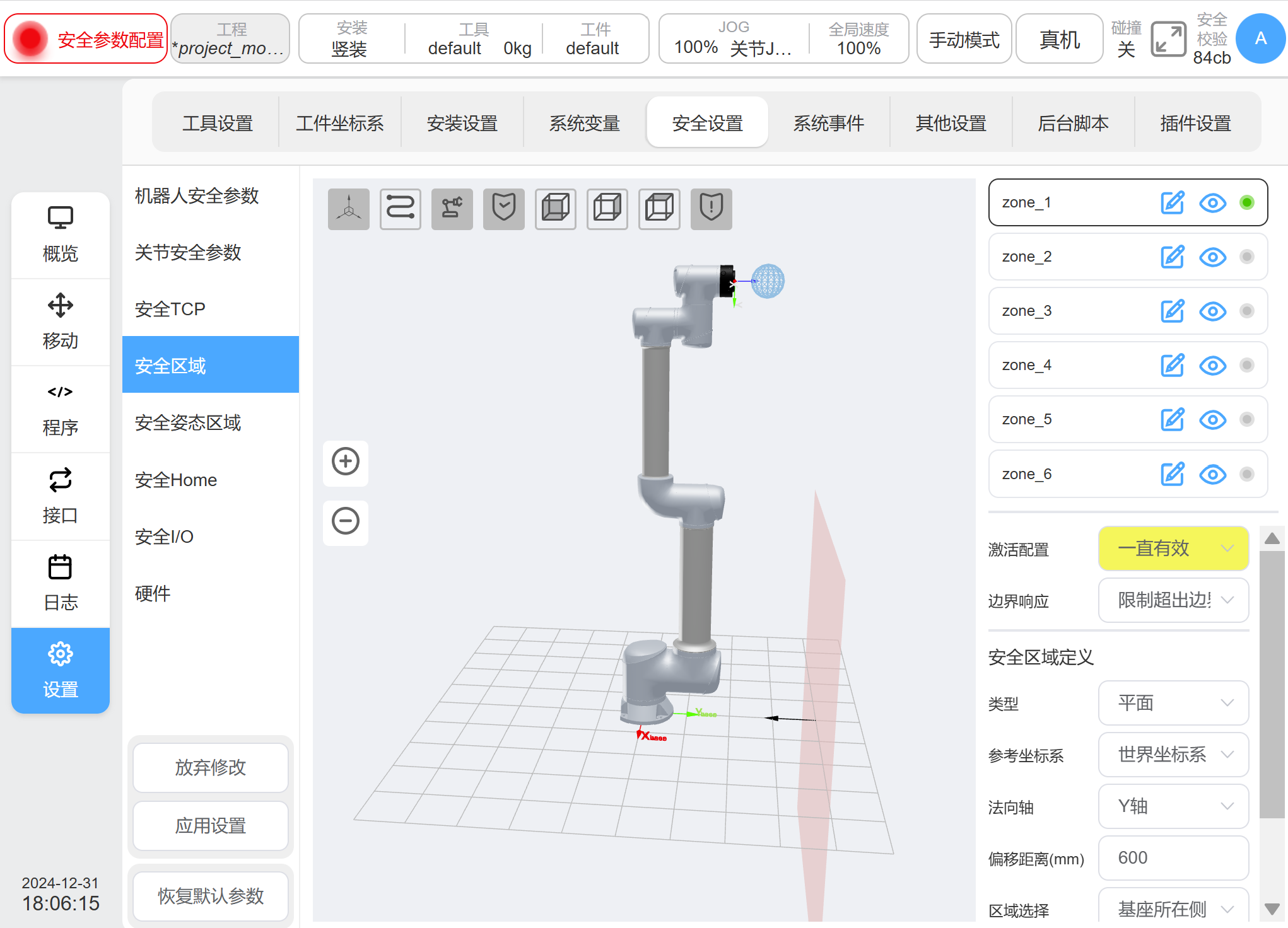
图4‑6平面安全区域图#
当配置的区域类型为平面时,平面区域的参考基准基于世界坐标系/基准/设定工作坐标系,通过设置平面法线方向和法线偏移来确定平面。通过“区域选择”可以将平面配置为有效区域,相应的方向用黑色箭头显示在3D区域中。
当配置的区域类型为空间矩形时,矩形区域的底边基于世界坐标系/底边/工件坐标系,工件坐标系用作矩形的角点,三个坐标轴分别对应长度(X)、宽度(Y)和高度(Z)。长度、宽度和高度的设置范围为-3000mm-3000mm。
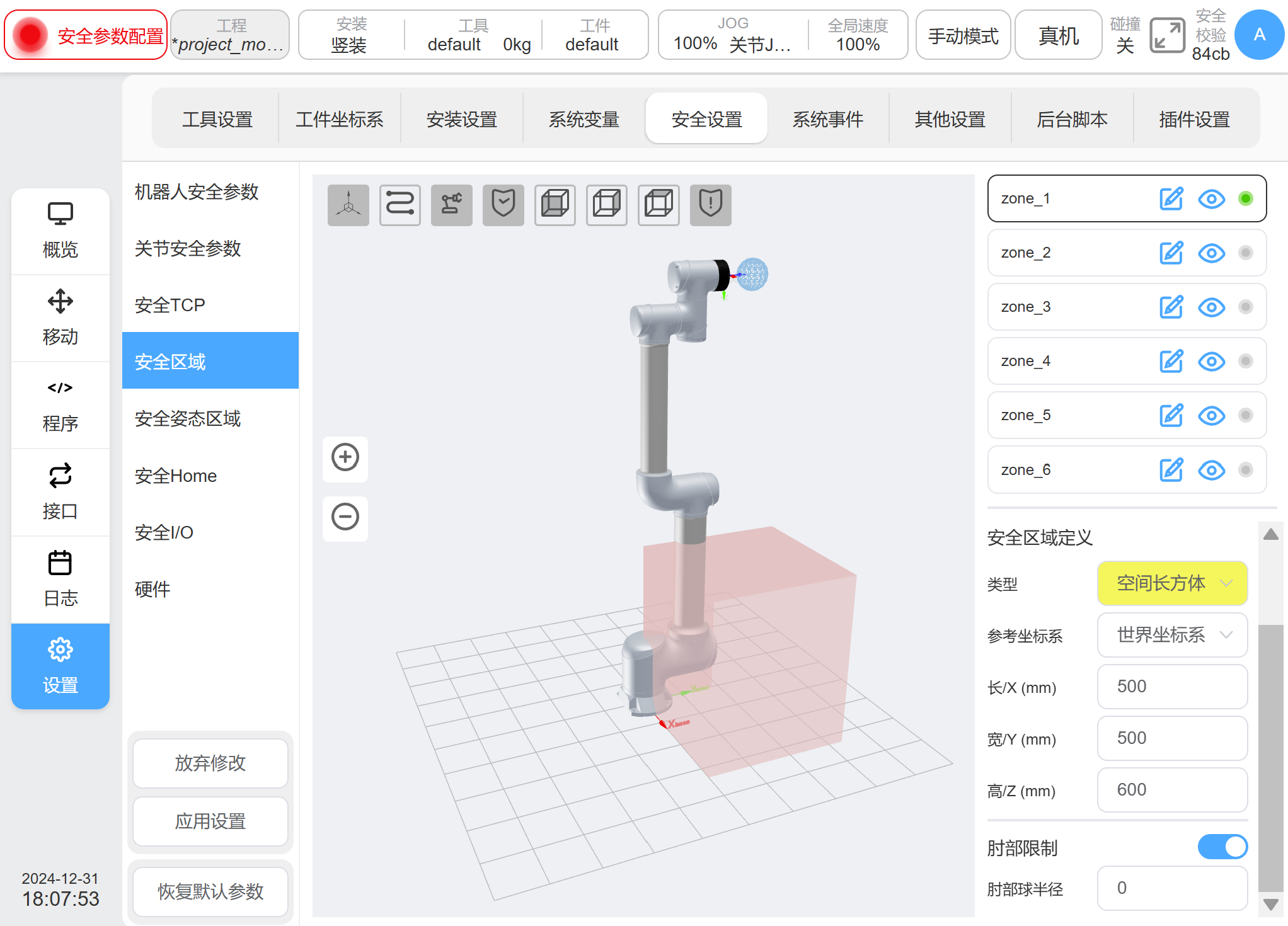
图4‑7空间直角安全区域图#
当配置区域类型为空间圆柱体时,其设置参照基于世界坐标系/基准/设定工件坐标系,以工件坐标系为圆形平面的中心,Z方向指向高度方向,可以设置半径和高度。 半径范围为0-3000mm,高度范围为-3000mm-3000mm。
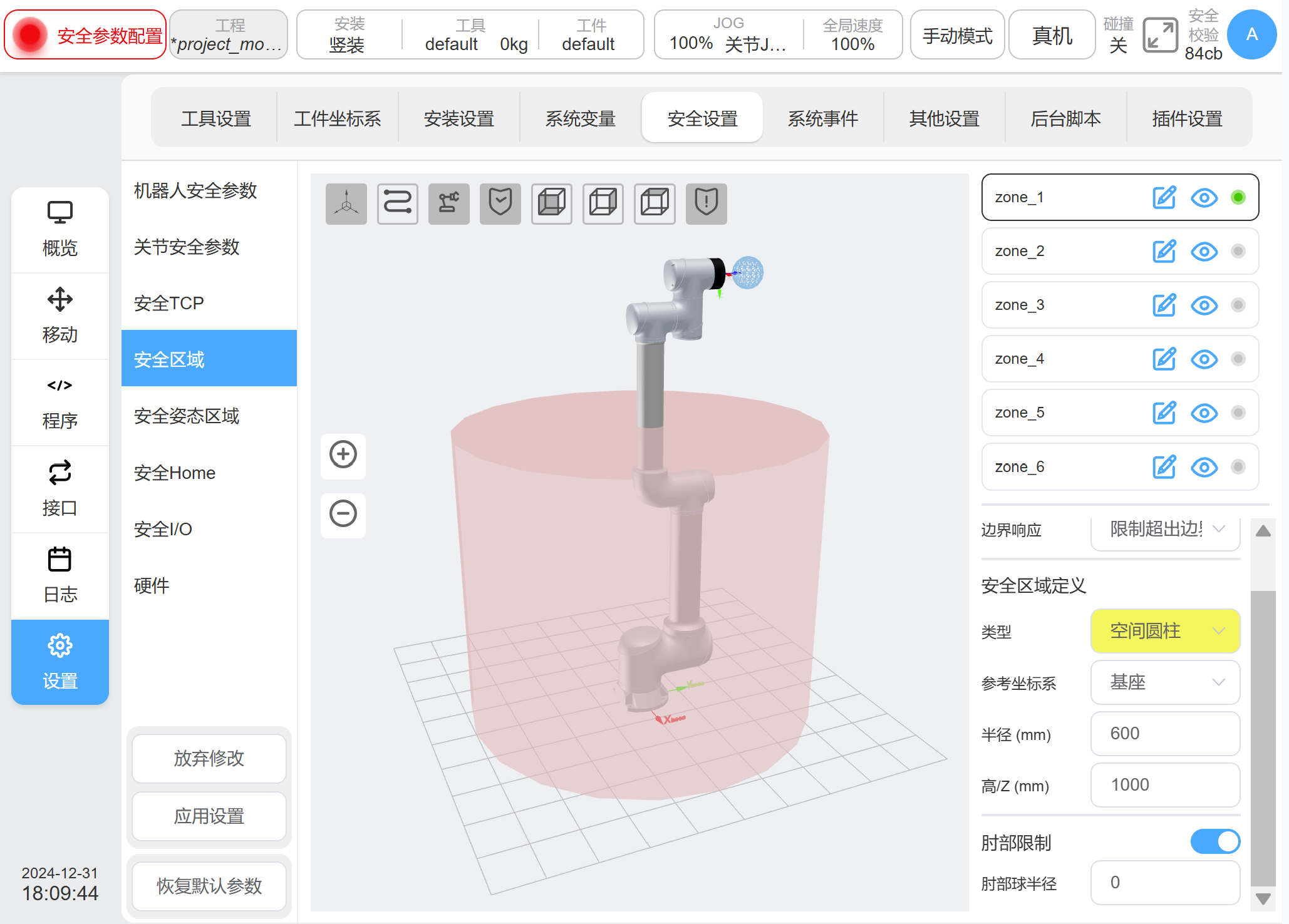
图4‑8空间圆柱体中的安全区域图#
安全TCP姿态区域#
一旦设置了安全TCP姿态区域,姿态区域将被激活,该区域是指围绕机器人基础坐标系中的方向矢量形成锥角。姿势限制仅将机器人TCP的Z轴限制在姿势区域内。用户最多可以设置三个姿势区域。
通过单击姿势区域右侧名称旁边的图标  可以显示或隐藏单个姿势区域,默认显示该图标。可以单击名称后的图标
可以显示或隐藏单个姿势区域,默认显示该图标。可以单击名称后的图标  来修改姿势区域名称。如果启用了姿势区域,则将显示
来修改姿势区域名称。如果启用了姿势区域,则将显示  否则
否则  将显示为禁用。
将显示为禁用。
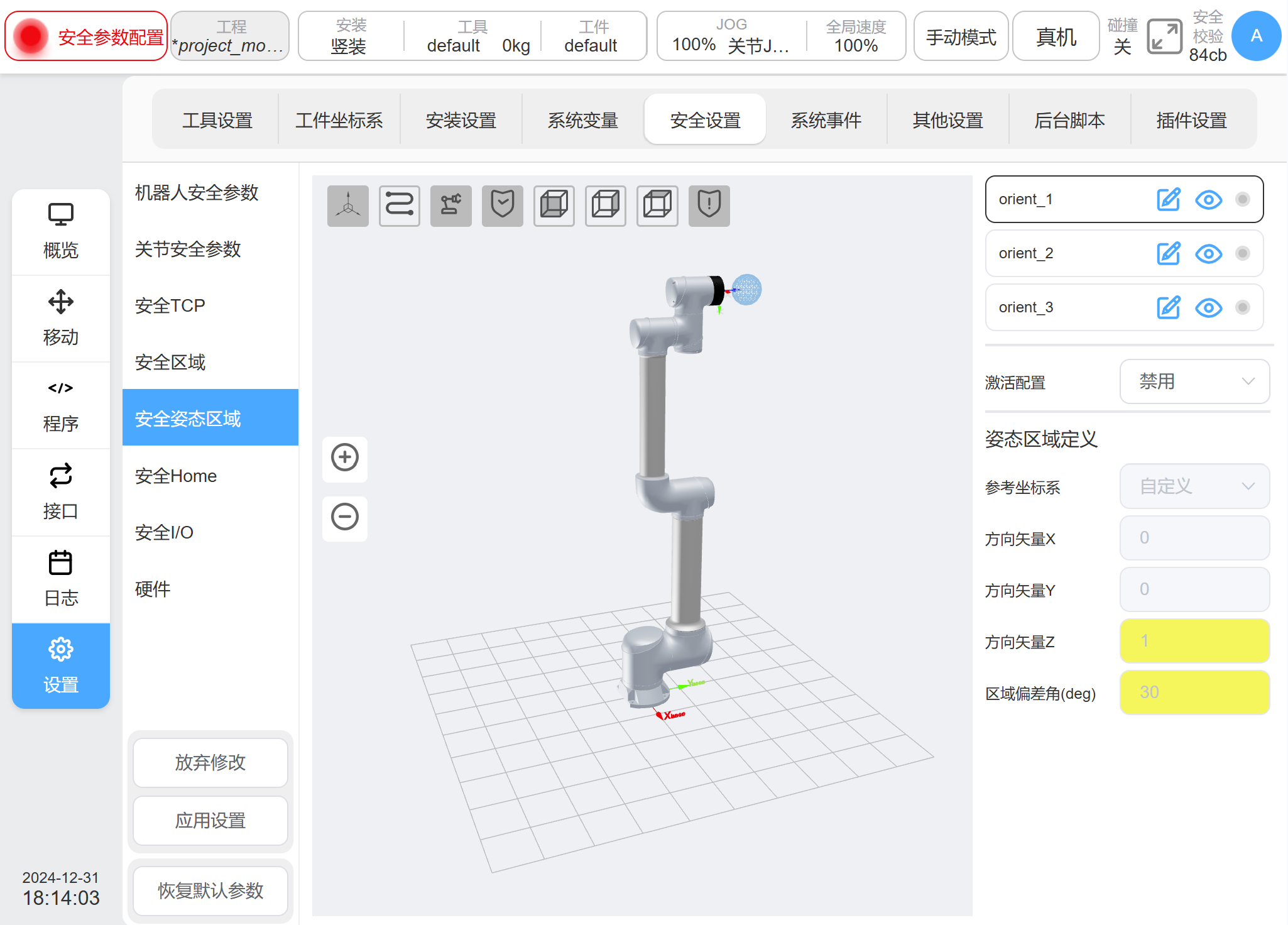
Figure 4‑9 安全TCP姿态区域激活#
安全姿势区域可以在五种模式下激活:禁用、始终有效、自动模式有效、安全组配置1和安全组配置2。安全TCP姿态区域与安全区域的不同之处在于,只有TCP的Z轴方向受到限制,并且在超过该区域后只触发一个保护停止响应模式。
为安全姿势区域定义参考坐标系有三种方法:自定义、捕获当前TCP姿势和通过预定义的工件坐标系定义。选择自定义时,手动修改方向向量X、Y、Z的值,该值描述了机器人基础坐标系中的值;当选择当前TCP姿态时,将当前TCP的z轴方向作为姿态区域的参考方向,并将该方向转换为机器人基础坐标系,以描述矢量方向X、矢量方向Y、矢量方向z。如果手动修改该值,则将成为自定义模式。当由工件坐标系定义时,将工件坐标系的Z轴方向作为姿态区域的参考方向,并转换为机器人基础坐标系,手动修改后,该值将更改为自定义模式。
如果工件坐标系的方向已从外部更改,则会在参考坐标系处显示提醒图标  。区域偏差角度的范围为5至180度。例如:
。区域偏差角度的范围为5至180度。例如:
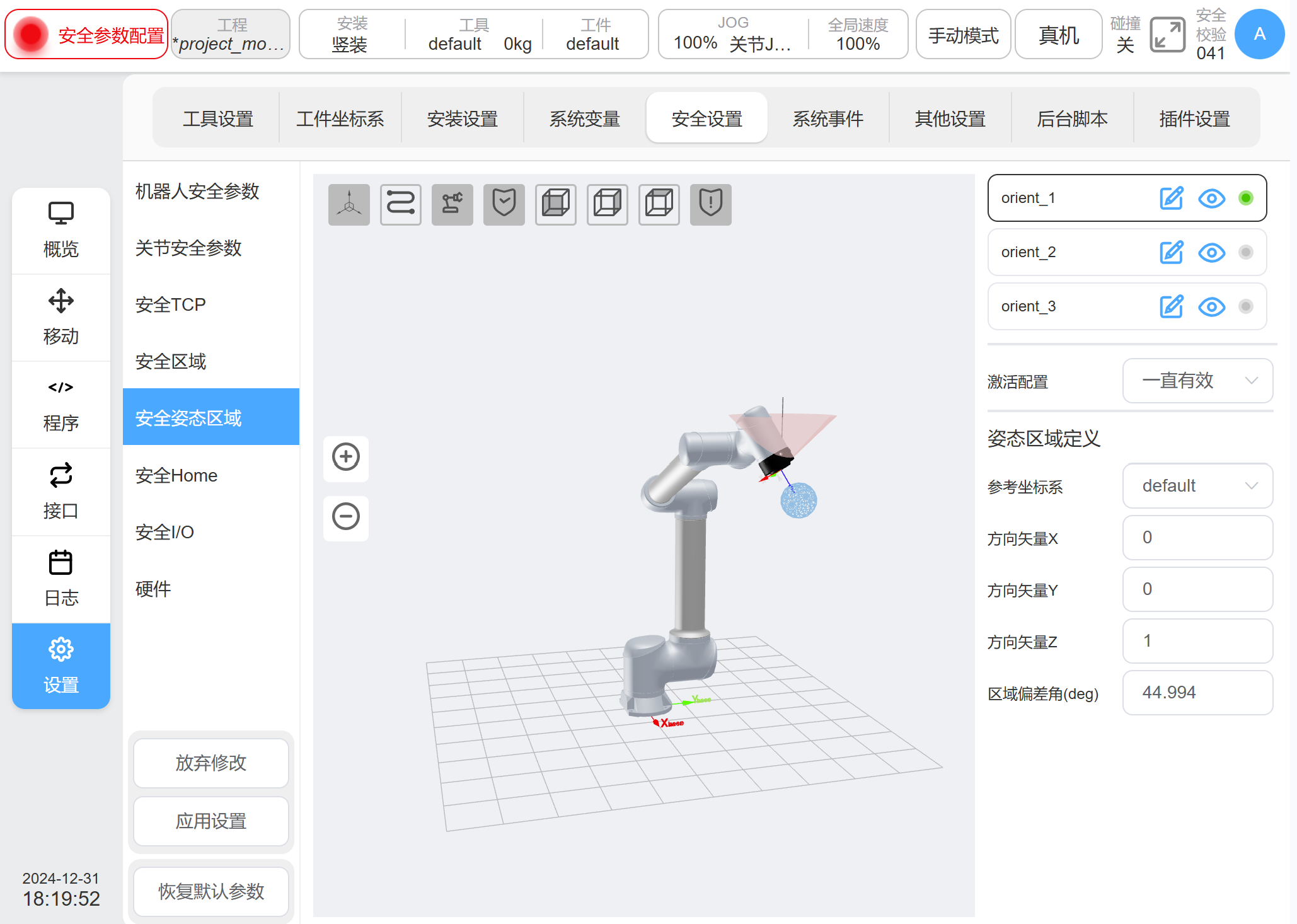
Figure 4‑10 安全TCP姿态区域参数设置#
安全Home#
对于安全Home设置,安全Home监控将同步“其他设置”屏幕中的Home位置设置。如果安全主页设置中的位置与其他设置中的主页位置不匹配,则同步主页设置屏幕上将显示提醒图标  。如果设置不同步,系统的初始位置将基于安全设置。移动接口中的原点操作以及来自机器人其他端口(例如端口2001)的原点信号的输出基于安全控制器的设置。“其他设置”屏幕中的起始点只是一个记录,不是判断起始点的依据。可以设置起始点的监控阈值,范围为1至5°
。如果设置不同步,系统的初始位置将基于安全设置。移动接口中的原点操作以及来自机器人其他端口(例如端口2001)的原点信号的输出基于安全控制器的设置。“其他设置”屏幕中的起始点只是一个记录,不是判断起始点的依据。可以设置起始点的监控阈值,范围为1至5°
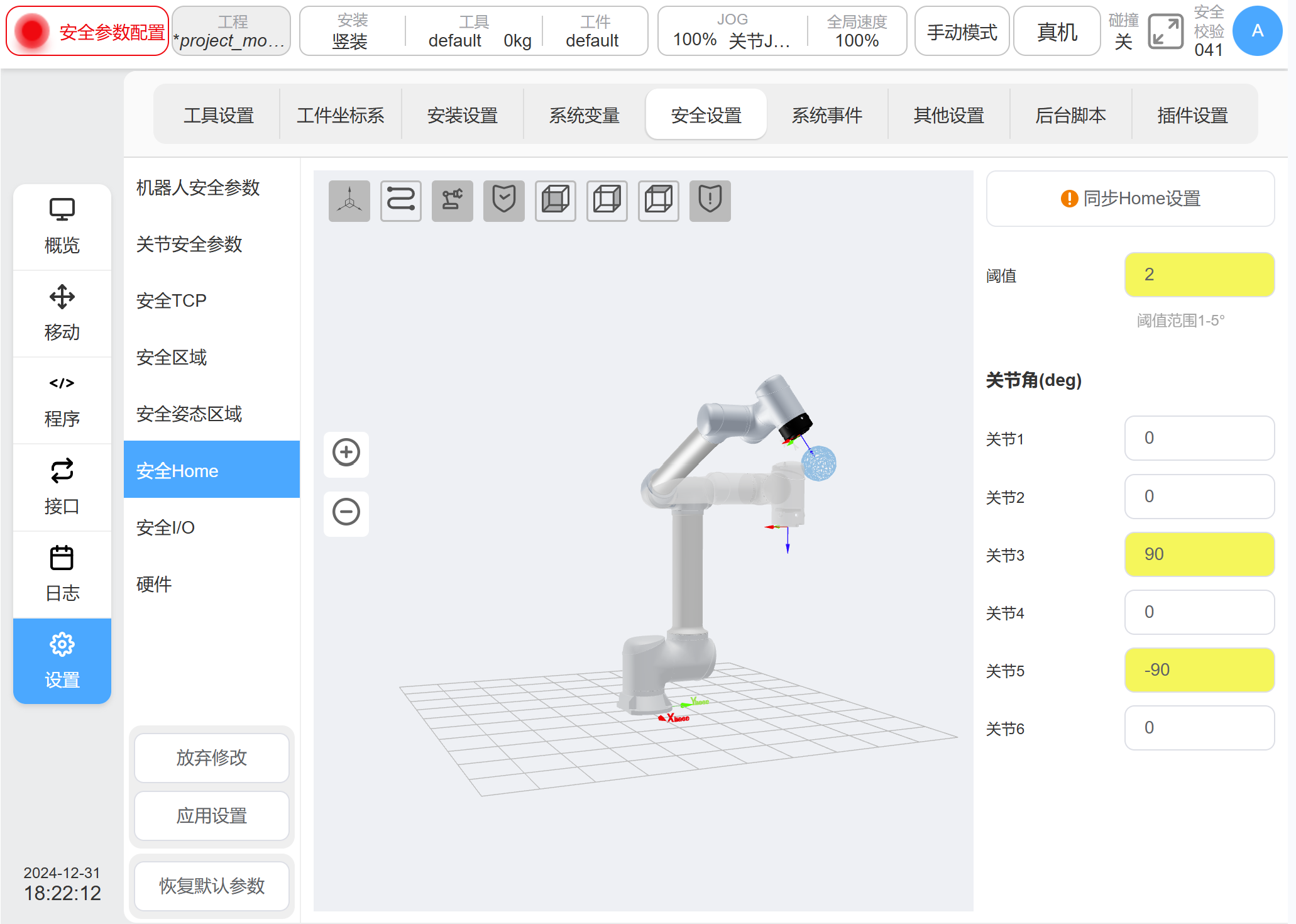
图4‑11 安全Home设置#
当选择同步的Home位置时,将显示Home位置的关节角度。3D模型显示区域机器人模型被刷新到相应的位置。
安全I/O#
安全IO模块上包括两个可配置的安全输入端口和两个可设置的安全输出端口。
包括安全输入功能:
保护性停止复位输入: 当发生保护性停止时,触发此端口,机器人恢复到正常状态。
自动模式保护性停止输入: 配置后,当机器人处于自动模式时,当该端口被触发时,机器人会执行保护性停止。
自动模式保护性停止复位输入: 当发生自动模式保护性停止时,触发此端口,机器人恢复正常状态。
缩减模式输入: 配置后,触发此端口将使机器人转换为减少模式。机器人将减速,以便在减速模式下参数限制与安全参数限制相匹配。
安全组合配置1/2: 当触发安全组合配置1或安全组合配置2端口时,所有配置为安全组合配置一或安全组合设置2的安全功能,包括安全TCP、安全区域和安全姿势区域,都将被激活并开始被监控;
安全输出功能包括:
保护性停止输出: 当机器人处于保护性停止状态时,此端口会被触发。
自动模式保护性停止输出: 当机器人处于自动模式保护性停止时触发。
缩减模式输出: 当机器人处于缩减模式时触发。
HOME位置输出: 当机器人接近安全HOME位置时触发。

图4‑12 安全I/O设置#
三位置使能#
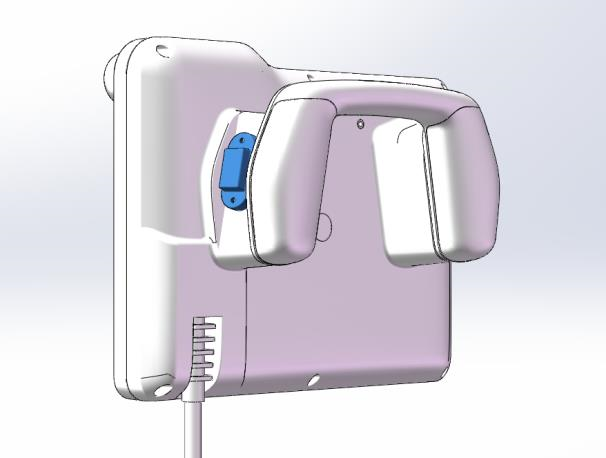
图4‑13 三位置使能#
在演示器手柄的位置,它是一个三位启用装置,如**图4‑13**所示。当机械臂处于手动模式时,这三个位置需要按下按钮至中心位置。如果未按下或完全按下此按钮,它将触发安全停止SS2,并在完成后进入SOS安全功能以监测异常的手臂运动。
如果使用示教器屏蔽端口,则三位使能功能将暂时失效。 请参阅《GCR系列协作机器人用户手册(控制柜)》
Warning
示教器(TP)屏蔽端口禁止用于单个TP和单个控制柜。
禁止在使用TP屏蔽端口时手动操作机器人。因为三位使能功能失效。