Packing attitude setting#
The Packing Attitude Settings sub-page is used for the values of each joint angle when the robot is packing the box position, as well as setting up the input boxes and some of the buttons, as shown in the figure below.
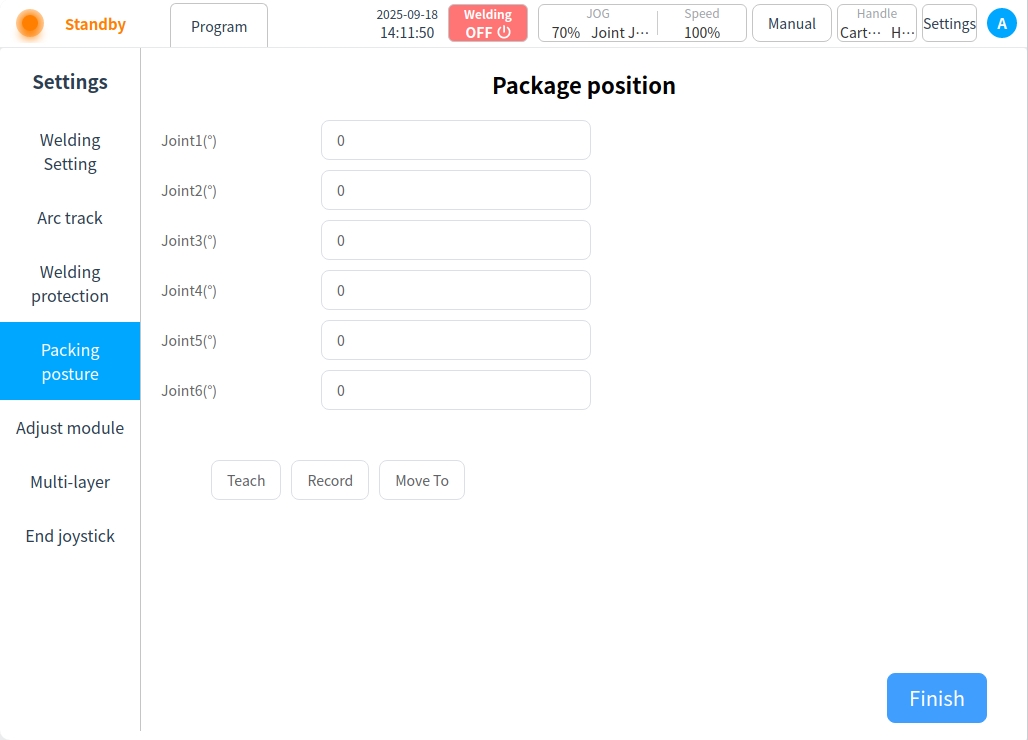
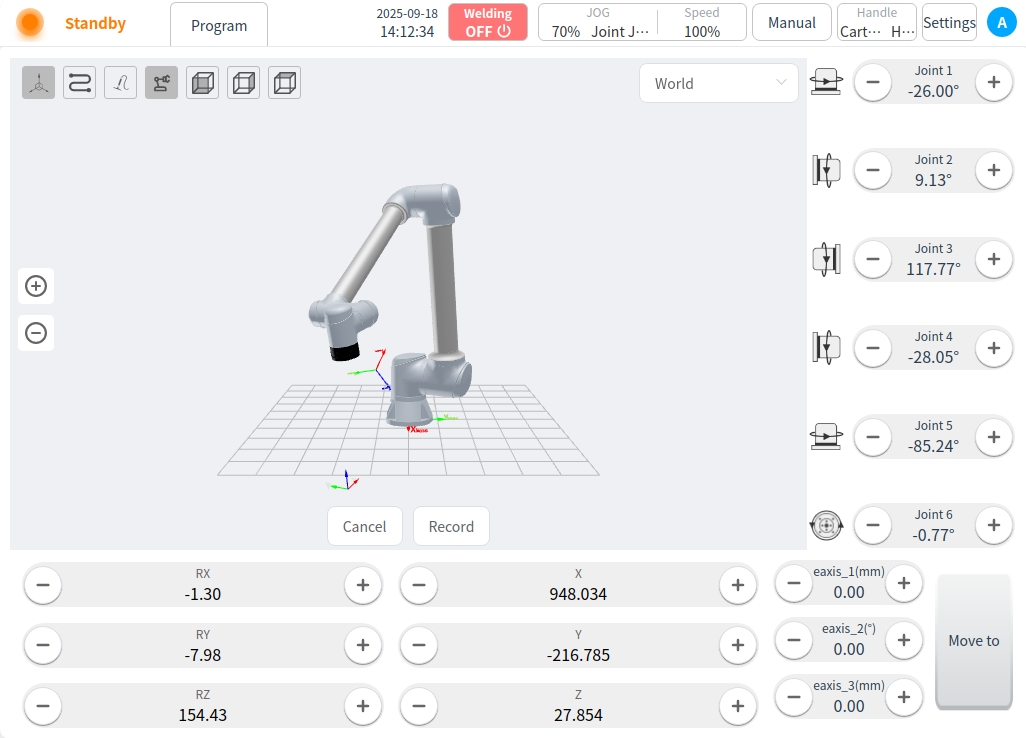
For crate setting, users can manually input the joint angle by clicking the input box of each joint of crate setting, or click the button of “Teaching Point” to jump to the robot control interface for teaching setting, after the JOG robot reaches the target point, click “Record Current Point”, the interface will jump back to the current sub-interface, and the page shows the value of the taught joint angle, as shown in the following figure. After the JOG robot reaches the target point, click “Record Current Point”, the interface will jump back to the current sub-interface, and the page displays the value of the taught joint angle, as shown in the following figure. You can also click “Record Current Point” on the page directly after the JOG robot reaches the target point through the physical button of the tutor. If the robot is not at the packing position, long press the “Move to this point” button to move the robot to the packing position.